Control Systems
Introduction
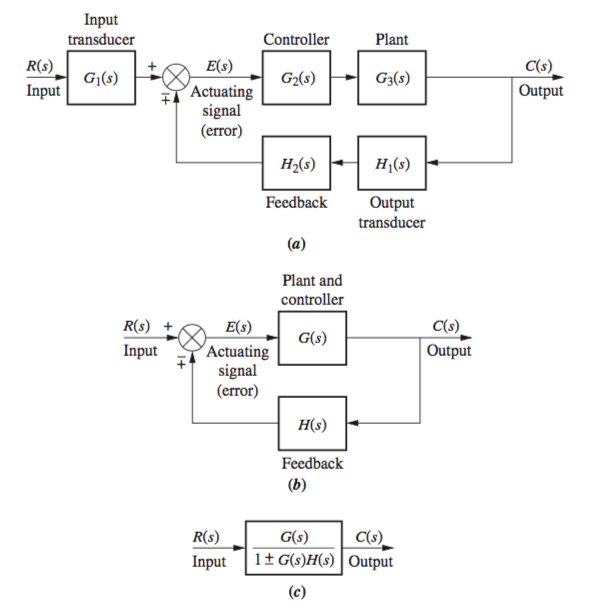
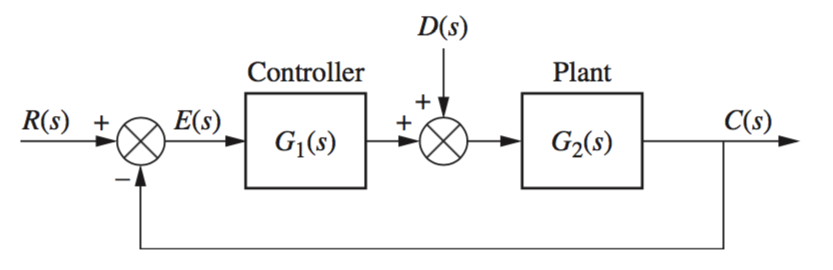
System Configuration
flowchart LR
R[Input / Reference]
IT[Input Transducer]
C[Controller]
S1((Σ Disturbance 1))
P[Process / Plant]
S2((Σ Disturbance 2))
Y[Output]
R --> IT --> C --> S1 --> P --> S2 --> Y
D1[Disturbance 1] --> S1
D2[Disturbance 2] --> S2
flowchart LR
R[Input / Reference]
IT[Input Transducer]
SUM1((Σ Error))
C[Controller]
S1((Σ Disturbance 1))
P[Process / Plant]
S2((Σ Disturbance 2))
Y[Output]
OT[Output Transducer / Sensor]
R --> IT --> SUM1 --> C --> S1 --> P --> S2 --> Y --> OT --> SUM1
D1[Disturbance 1] --> S1
D2[Disturbance 2] --> S2
Open Loop systems do not monitor or correct the output for disturbances; however, they are simpler and less expensive than closed-loop systems.
Closed Loop systems monitor the output and compare it to the input. If an error is detected, the system corrects the output and hence corrects the effects of disturbances.
Analysis and Design Objectives
Transient Response
That part of the response curve due to the system and the way the system acquires or dissipates energy. In stable systems it is the part of the response plot prior to the steady-state response.
Steady-State Response
Also known as Forced Response, for linear systems, that part of the total response function due to the input. It is typically of the same form as the input and its derivatives.
Stability
That characteristic of a system defined by a natural response that decays to zero as time approaches infinity.
Modeling in the Frequency Domain
Time Response
Reduction of Multiple Systems
Block Diagrams
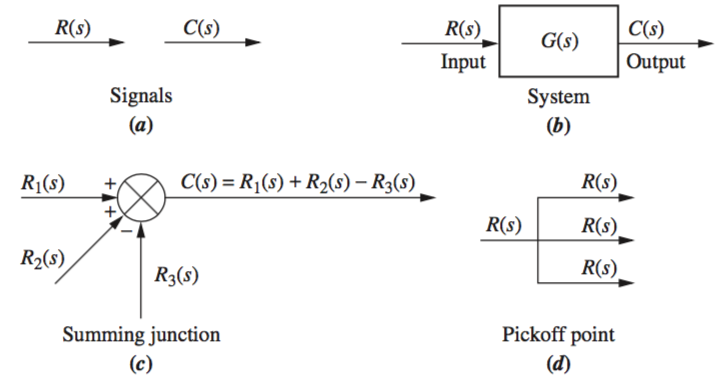
The block diagram of a linear, time-invariant system consists of four elements: signals, systems, summing junctions , and pickoff points . These elements can be assembled into three basic forms: cascade, parallel , and feedback.
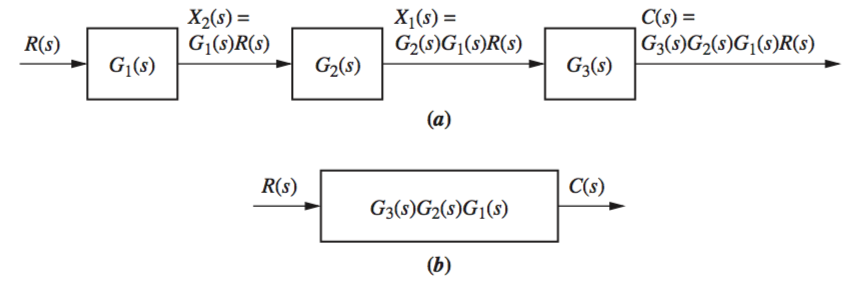
Cascade Form
Parallel Form
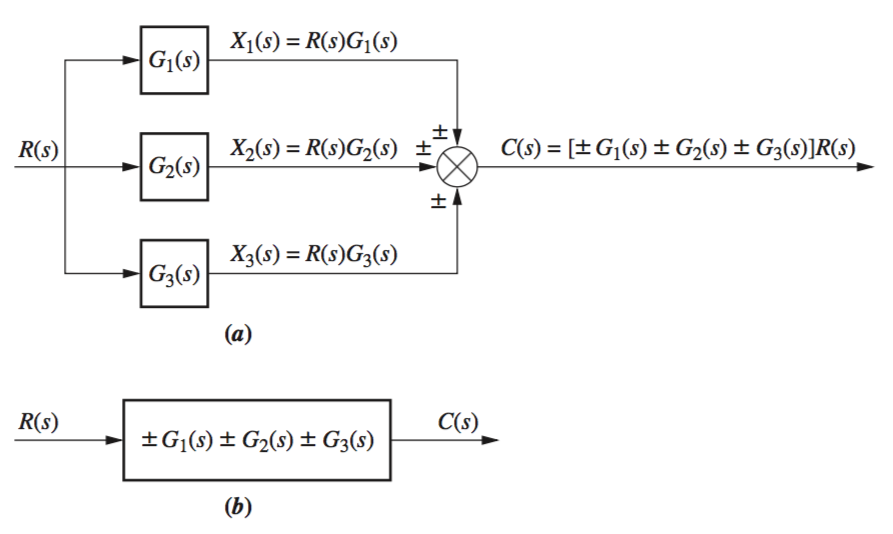
From the above diagram, it is clear that each branch will be
Feedback Form
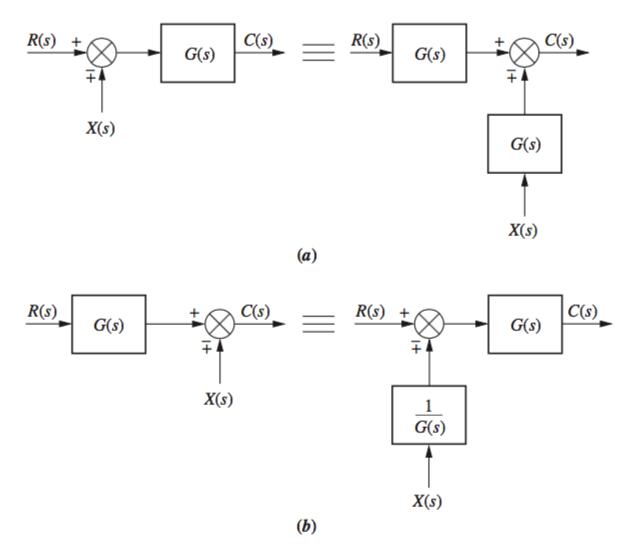
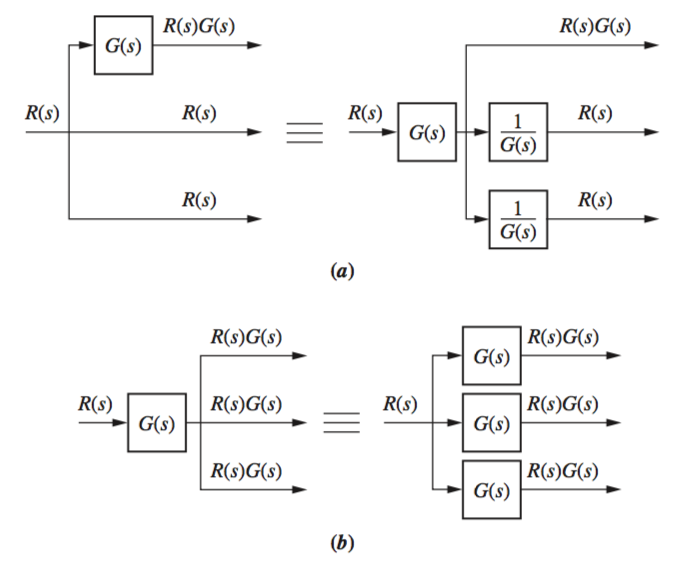
Moving Blocks
From these diagrams, the logic of moving each process can be validated when summing each signal and multiplying by each process, then doing the same for its equivalent system.
Stability
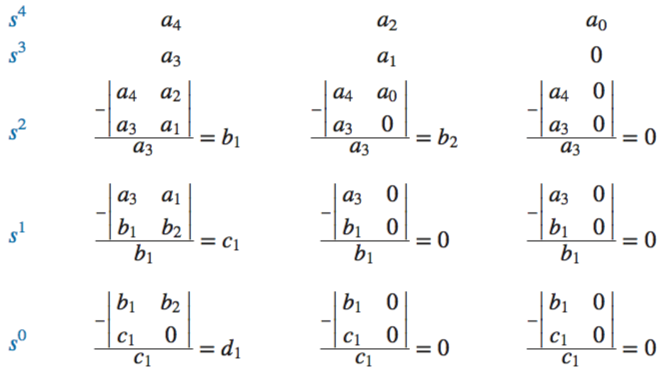
Routh-Hurwitz Criteria
Routh-Hurwitz Special Cases
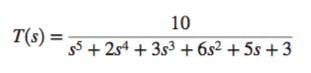
Zero Only in the First Column
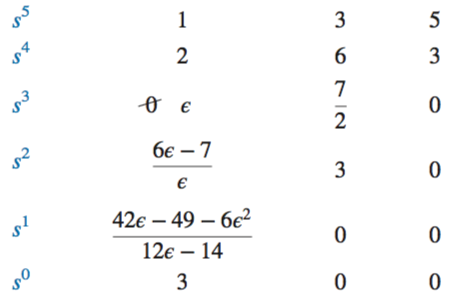
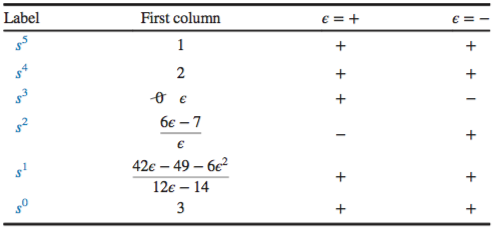
Assume a value for the variable
Alternately, the reverse coefficients of the denominator can be used in analysis, as seen below:

Entire Row Is Zero
If an entire row is zero, return to the row above, and form the equation represented by those coefficients. For example, from the system below, at row
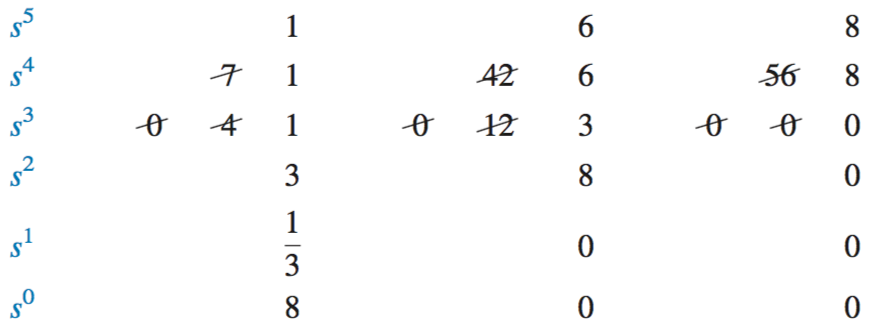
In the case of a row of zeroes formed by a row of even polynomials, for example
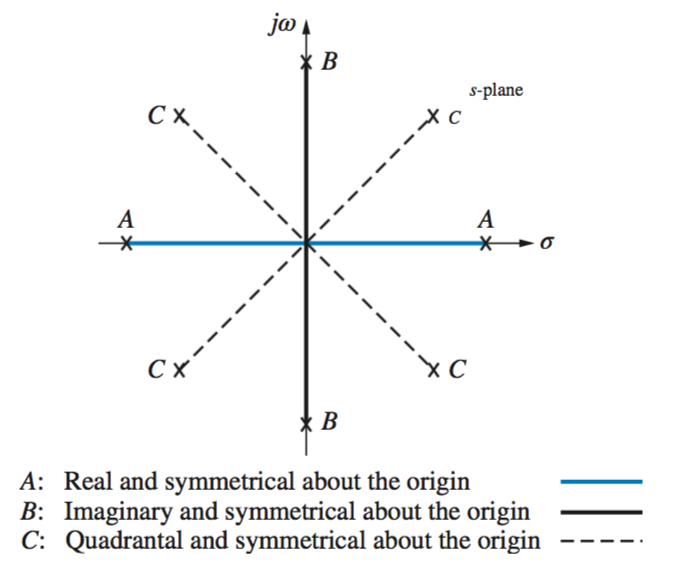
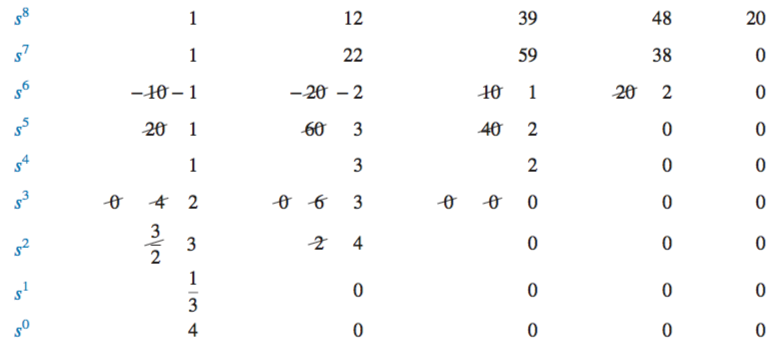
From the example above, the row of zeroes can be seen to occur in the
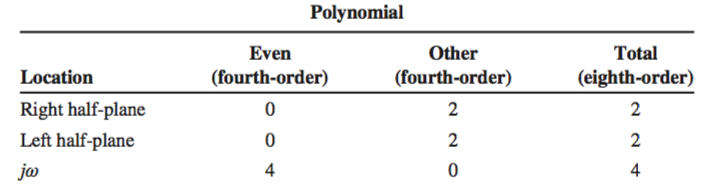
The findings for the even polynomials are then combined with the findings for the rest of the system:
Steady State Errors
\textit Steady State Error is defined as the difference between the input and output as t
Most steady state errors
In the first case

From these systems we see that
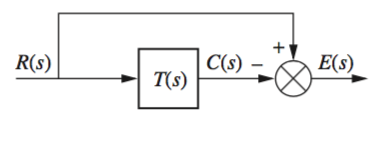
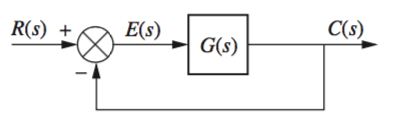
Steady State Error for Unity Feedback Systems
Steady-state error can be calculated from transfer function
Steady State Error in Terms of
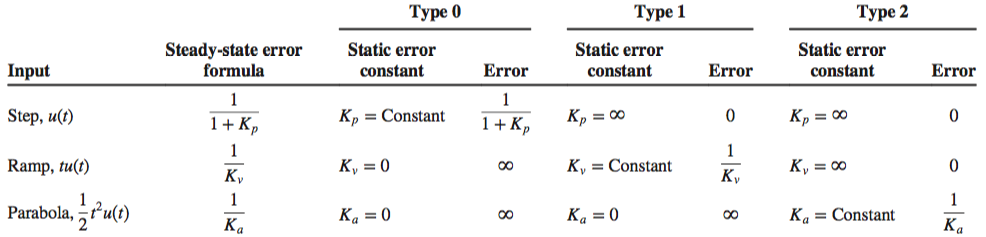
Static Error Constants and System Type
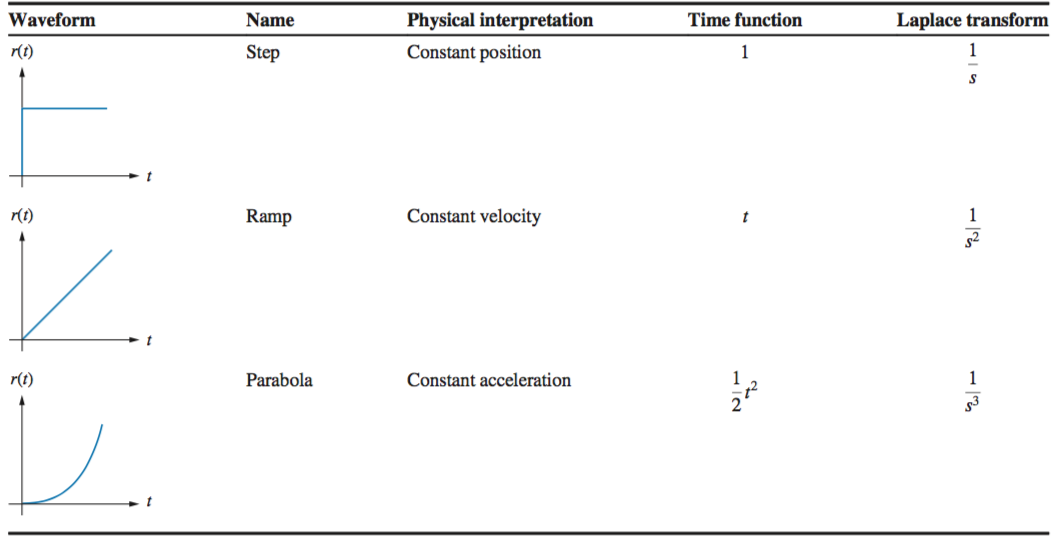
The steady-state error for unit step inputs is
The steady-state error for ramp inputs of unit velocity is
The steady-state error for parabolic inputs of unit acceleration is
The terms in the denominator are known as
Systems can also be defined by system type. This defines the number of pure integrations in the forward path, assuming a unity feedback system. Increasing the system type decreases the steady-state error as long as the system is stable.
This will also be apparent by the structure of the system. An
Steady-State Error Specifications
The steady-state error is inversely proportional to the static error constant - the larger the constant, the smaller the steady-state error. Increasing gain increases the static error constant, thus, increasing the gain decreases the steady-state error if the system is stable.
Steady State Disturbances
However,
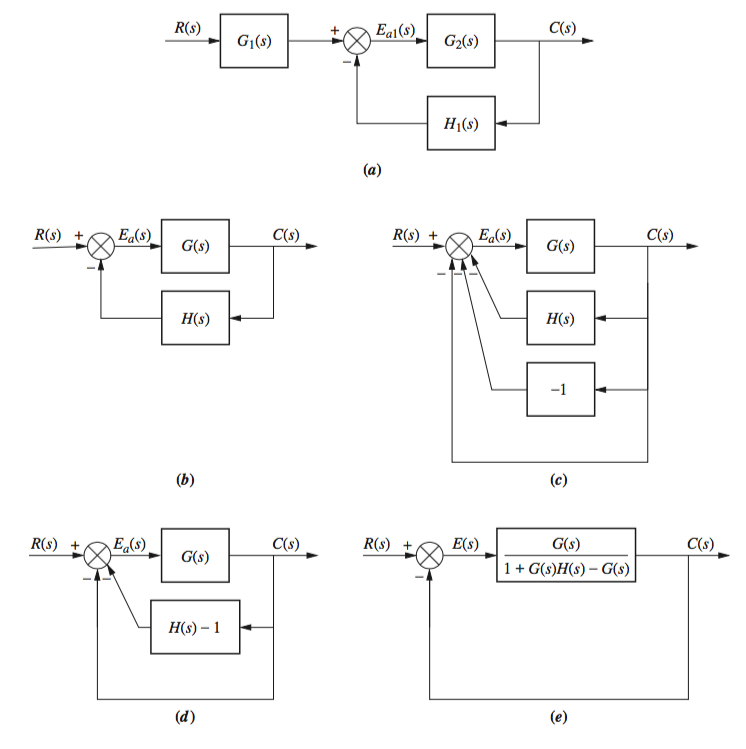
Forming Equivalent Unity from Non-Unity Systems
Root Locus Techniques
The following sections apply to Negative Feedback Closed Loop systems.
Sketching the Root Locus
Number of Branches
The number of branches in a root locus equal the number of poles.
Symmetry
The root locus is symmetrical about the real axis.
Real Axis Segments
On the real axis, for
Starting and Ending Points
The root locus begins at the finite and infinite poles of
Behavior at Infinity
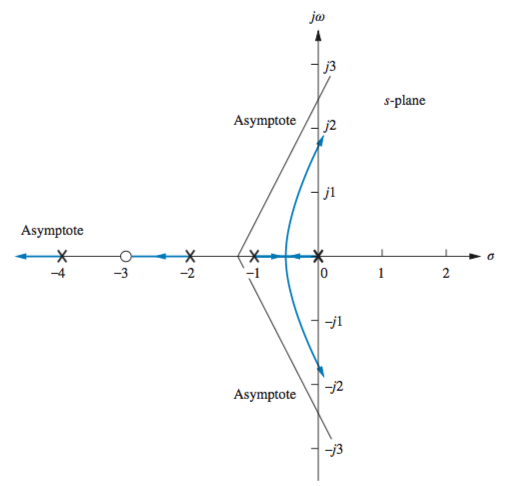
When finding
Refining the Sketch
Breakaway/Break-in Point
At the breakaway or break-in point, the branches of the root locus form an angle of 180°/
For all points on the root locus,
Or, conversely,
Where
The crossing of the
The
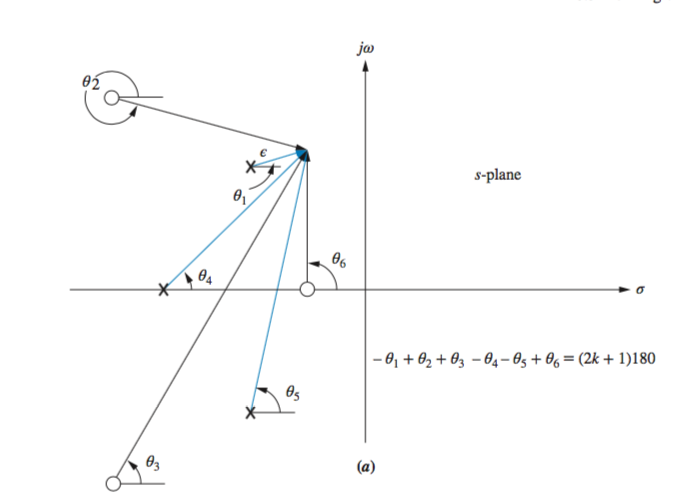
Angles of Departure and Arrival
If we assume a point on the root locus
or
If we assume a point on the root locus
or
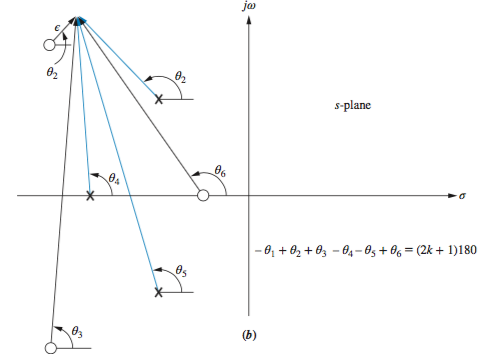
Note that finding the angle at these points is calculating the length from the poles or zeroes to this point.
Plotting and Calibrating the Root Locus
When locating points on the root locus and finding their specified gain, for example as it crosses the radial line representing 20% overshoot, such as the below graph where
Evaluating the graph at points along the line, and summing the angles from poles and zeros, it can be determined if a point is on the root locus if the angles are a multiple of 180
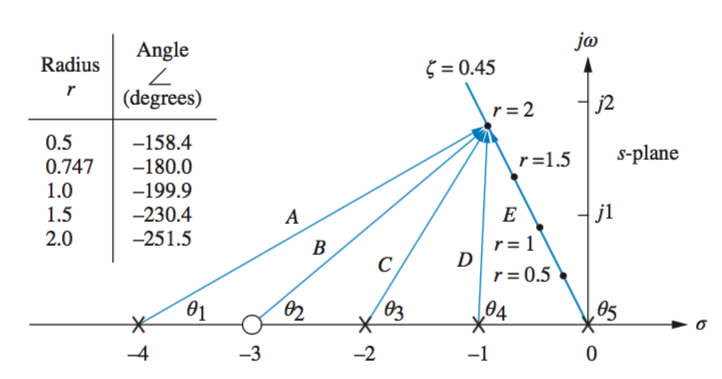
From this value
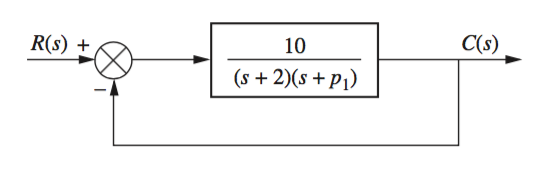
Generalized Root Locus
If finding the root locus of a system concerning a single parameter instead of gain
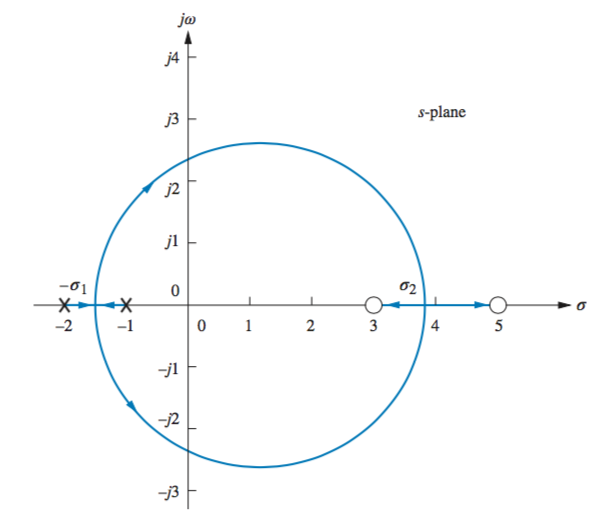
Positive Feedback Systems
- Number of Branches No change
- Symmetry No change
- Real Axis Segments On the real axis, the root locus for positive-feedback systems exists to the left of an even number of real-axis, finite open-loop poles and/or finite open-loop zeros.
- Starting and Ending Points The root locus for positive-feedback systems begins at the finite and infinite poles of
and ends at the finite and infinite zeros of . - Behavior at Infinity The root locus approaches straight lines as asymptotes as the locus approaches infinity. Further, the equations of the asymptotes for positive-feedback systems are given by the real-axis intercept,
, and angle, , as follows:
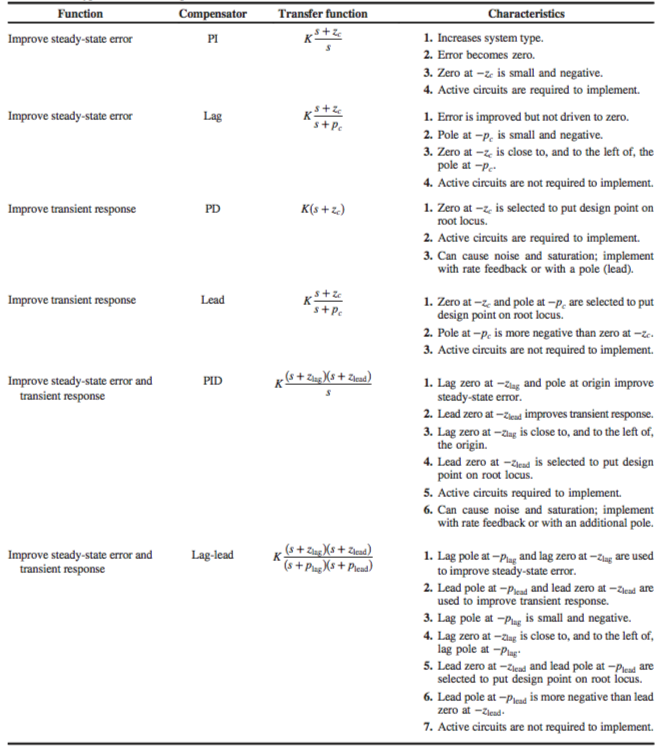
Design via Root Locus